این مطلب بخش پنجم از راهنمای جامع ساخت پرینتر سه بعدی هایپرکیوب است. در این آموزش شناختی نسبت به مجموعه الکترونیکی پرینتر و راه اندازی آن پیدا خواهید کرد.
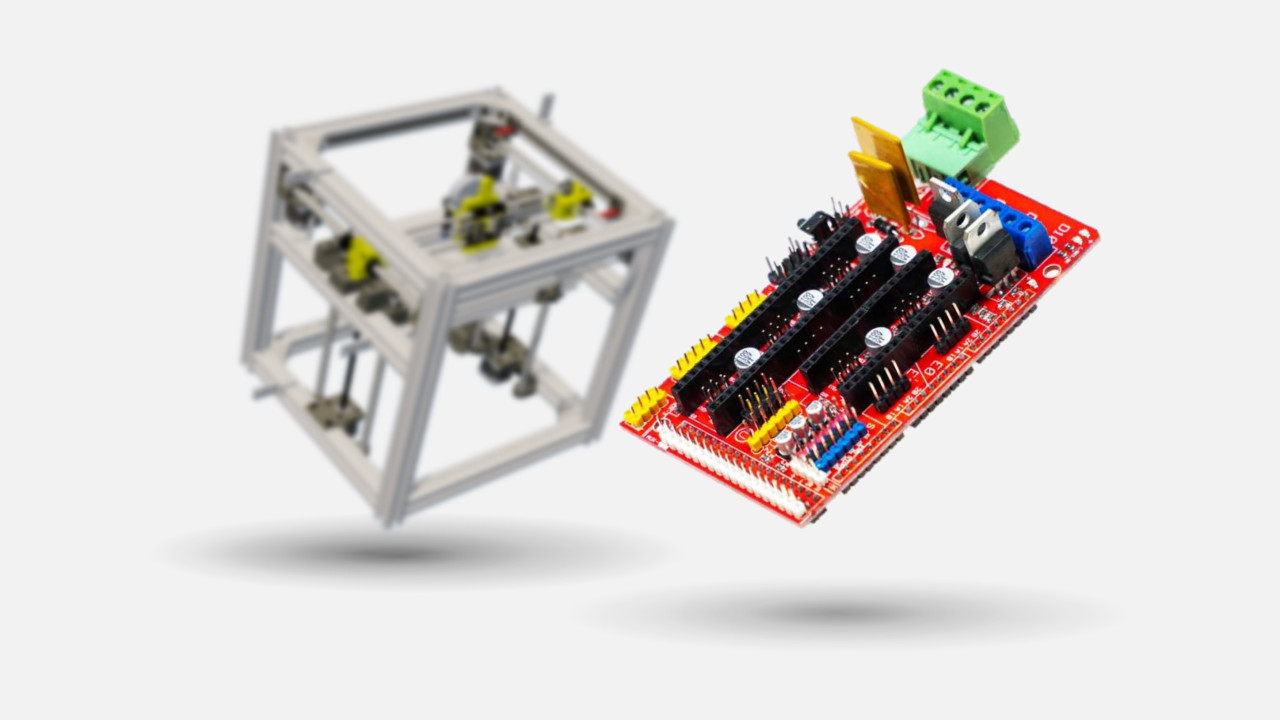
مجموعه الکترونیک
تمام مجموعه الکترونیک شامل قطعات زیر است:








هر کدام از این قطعات به طور جداگانه به مجموعه مربوط به خود متصل می شوند. برای اسمبل مجموعه فرمان به صورت زیر عمل می شود. ابتدا برد رمپس از طریق پین های تعبیه شده در زیر آن به آردوینو متصل می شود. سپس جامپرها را (12 عدد) روی پین های x، y، z و اکسترودر که با نام E0 روی برد مشخص شده است. قرار داده می شود. دقت شود که جهت پین ها اهمیت ندارد.
همراه برد 15 عدد جامپر ارسال می شود چرا که برد رمپس قابلیت اتصال یک عدد اکسترودر اضافی را نیز دارا است. وظیفه جامپرها در حقیقت دقت بیشتر حرکت موتورها است.
حال شیلد مربوط به رابط LCD به برد رمپس متصل می شود.
درایورها به داخل محل مربوط به خود قرار داده می شوند. پشت پین های هر درایور نوشته هایی مربوط به نوع کارایی پین آورده شده است که دقیقا این نوشته ها روی برد رمپس تکرار شده است. هنگام قرار دادن نوشته ها به محل قرار گیری پین ها دقت بسیار شود.
در هنگام قرار دادن پین ها توجه کنید که حتما پین های مشابه را به هم متصل کنید. در غیر اینصورت ممکن است که منجر به سوختن درایور و یا یکی از برد ها شود. برای انجام این کار یکی از پین های روی برد را که واضح تر است (معمولا پین GND) را با پین مورد نظر روی درایور مطابقت داده و متصل کنید.
چنانچه در هنگام راه اندازی و یا کار دستگاه موتورهای محورها صدای نویز ایجاد کرده و یا در موتور اکسترودر بعد از مدتی اخلال ایجاد شود، باید جریان عبوری از درایورها را کاهش دهید. برای این کار پیچ تنظیم جریان درایورها را به صورت ساعتگرد بچرخانید. همچنین توجه شود که چرخاندن پیچ باید بسیار آهسته و به میزان خیلی کم انجام شود. مثلا حدود یک چهارم دور چرخانده شود.
اسمبل کردن نمایشگر
کارت SD به طور صحیح داخل LCD قرار داده شود. کابل اتصال به LCD و شیلد رابط متصل می شود.
برای قرار دادن مجموعه برد روی دستگاه از مانت مربوط به آن استفاده می شود. با استفاده از دو پیچ به طول های 20 و 40 میلی متر مانت به برد متصل می شود. سپس پیچ ها برای اتصال به پروفیل به مانت متصل می شوند.
برای اتصال برد به بدنه ابتدا سیم ها از پشت LCD جدا شده سپس در ارتفاع تقریبی نصف ارتفاع بدنه اصلی، به بدنه متصل می شود طوری که محل ورود سیم های برق (سوکت سبز رنگ) به سمت پایین باشد.
اکنون نوبت به بستن LCD بر روی بدنه می رسد. ابتدا مهره ها داخل شیار مربوط به خود قرار می گیرند. سپس پیچهای M5 به همراه مهره تی آماده می شوند.
ابتدا پایه سمت چپ به روی بدنه بسته شده، بعد از بسته شدن LCD روی آن، پایه دوم به ترتیب ابتدا به LCD و سپس به بدنه متصل می شود. بعد از اتصال LCD روی بدنه، سیم های آن مجددا به برد متصل می شوند.
مجموعه منبع تغذیه
ابتدا اتصالات به منبع تغذیه متصل شده سپس منبع به همراه مانت خود روی فریم اصلی نصب می شود.
یک سیم دو رشته که یک سر آن یک دوشاخه قرار داشته و سر دیگر آن آزاد است به ورودی منبع تغذیه (به دو ورودی N و L) متصل می شود. چهار سیم به صورت دو سیم دو رشته از یک سر به محل ورود برق به برد (سوکت سبز رنگ) و از سوی دیگر به منبع تغذیه به صورت زیر متصل می شوند.
سپس منبع تغذیه بدون هیچ نیازی به اتصالاتی درون مانت خود قرار گرفته و مجموعه به بدنه دستگاه متصل می شود. دو سیم فن خنک کننده هات اند نیز به طور مستقیم به منبع تغذیه متصل می شود. سر سوکت نیز به محل خود روی برد متصل می شود.
سیمهای ورودی و خروجی
نقشه کلی سیم کشی برد به صورت زیر است:
جهت سیم موتورها در وهله اول اهمیتی ندارد. چنانچه محورها در جهت اشتباه حرکت می کردند به بخش راهنمایی سیستم حرکتی دستگاه رجوع شود. توجه شود که در هنگام نصب سنسورهای برخورد سیم سبز رنگ روی پین S قرار میگیرد (اگر طبق شکل زیر برد نگه داشته شود سیم سبز رنگ به سمت بالا خواهد بود) در شکل زیر محل سیم فن حلزونی (داکت خنک کننده لایه ها) مشخص می باشد. جهت قرار گرفتن سیم های هیتر اکسترودر و سنسورهای دما اهمیتی ندارد. دقت کنید که جهت اتصال هیتر صفحه پرینت مهم است.
چگونگی آپلود کردن firmware در آردوینو
پس از نصب نرم افزار برنامه نویسی Arduino فایل مربوط به firmware مارلین را باز کنید و بر روی فایل file Arduino به نام Graphic_Full_VSB_hypercube_Marlin دبل کلیک کنید تا فایل در داخل نرم افزار باز شود.
سپس باید از منو گزینه tools را انتخاب کرده و در قسمت Boards اتصال برد mega Arduino خود را بررسی کنید. هر کدام از گزینه ها Arduino Geniuno Mega or Mega 2560 و Arduino Mega ADK قابل قبول هستند.
پس از آن اطمینان حاصل کنید که پرو سسور مناسب به نرم افزار متصل شده با شد. گزینه ATmega 2560 قابل قبول است.
در نهایت در گزینه Port بایستی کانال اتصال مناسب را به منظور آپلود انتخاب کنید. در اینجا COM8 کانال اتصال به Arduino 2560 Mega می باشد ولی برای شما ممکن است شماره متفاوتی باشد. به هر حال کانال اتصال به آردوینو را انتخاب کنید.
در نهایت کلید مربوط به Upload را بفشارید و مدتی صبر کنید تا عملیات آپلود روی بورد انجام شود.
پس از اتمام فرآیند Upload در قسمت پایینی نرمافزار نوشته Upload is done نمایش داده میشود.
مطالب قبلی


مطالب بعدی

در این قسمت نحوه نصب موتورها بر روی محور X و Y واکسترودر و بستن تسمه و نصب فیدر بر روی فریم را یاد گرفتید. در آموزش بعدی، به مجموعه الکترونیک پرینتر سه بعدی هایپرکیوب خواهیم پرداخت. نظرات شما باعث بهبود محتوای آموزشی ما میشود. اگر این آموزش را دوست داشتید، همینطور اگر سوالی در مورد آن دارید، از شنیدن نظراتتان خوشحال خواهیم شد.